

工場内にある設備やクレーンなど、装置を目的の位置に停止させる為には様々な検出器が使われます。
本記事でご紹介するロータリエンコーダもその一つで、回転する機器の回転量を検出することができるセンサです。
ただ、ロータリエンコーダに馴染みがない方にとっては、どのようなセンサなのかよく分からないという
この記事では、そんなロータリエンコーダの構造やメリットとデメリットについて徹底解説していきます。
 ひでくん
ひでくん僕がメンテナンスしている設備にもロータリエンコーダはたくさん使われているね
 なべ
なべモータやボールネジ装置など、回転させて駆動する機器の位置決めにロータリエンコーダはよく使われていますよ
ロータリエンコーダって何をするものなの?
ロータリエンコーダは、モータ等の機器に直結して一緒に軸を回転させることで、回転した量を信号として取り出せる検出器です。
ロータリエンコーダの形は様々ですが、一般的なロータリエンコーダは下の写真のような形をしています。
引用先:MISUMI(ロータリエンコーダE40シリーズ)

一見するとモータみたいですね。
エンコーダからは軸が出ていて、この軸を回転している機器にカップリング等で接続して一緒に回転させて使います。
例えば、下の図のようなモータで駆動させているベルトコンベアの場合、ベルトで回る従動プーリーにエンコーダを取り付けることで、プーリーと一緒にエンコーダの軸も回転します。
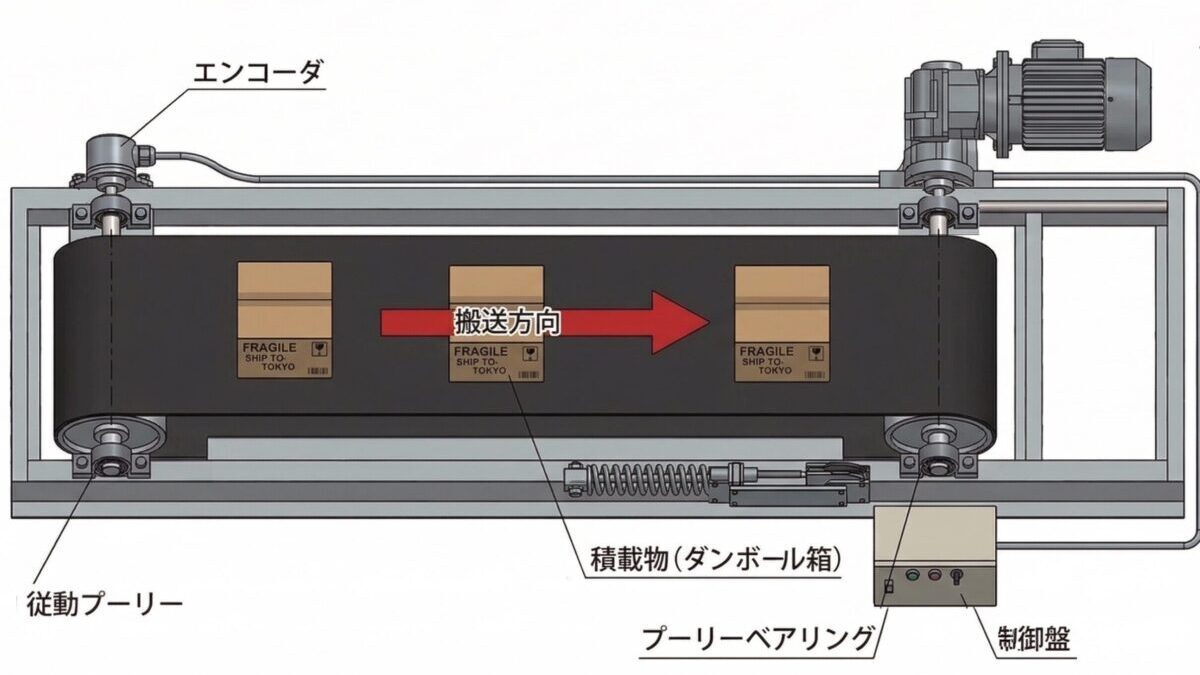
エンコーダを回転させると信号が出力されてくるので、PLCなどの制御機器でその信号を受け取って位置決めなどの制御を行います。
あらかじめ、プーリーがどれぐらい回転すれば積載物を目的の位置まで移動できるかが分かっていれば、エンコーダからの信号からコンベアの移動量を計算することができるので、これによって正確にコンベアを停止させることができるようになります。
ひでくんエンコーダからの信号を上手に活用すれば、移動量だけではなく速度も計算することができるんだよ
ロータリエンコーダってどんな種類があるの?|信号の出力方式によって大きく2種類
ロータリエンコーダには、出力される信号の方式によって、大きく「インクリメンタル形」と「アブソリュート形」の2種類に分けられます。
インクリメンタル形
インクリメンタル形は、軸の回転量に応じてパルス信号が出力されてくるタイプのエンコーダです。
パルス信号とは短い間隔でON/OFFを繰り返す電気信号のことを言います。
グラフで表すと上の図のようになります。
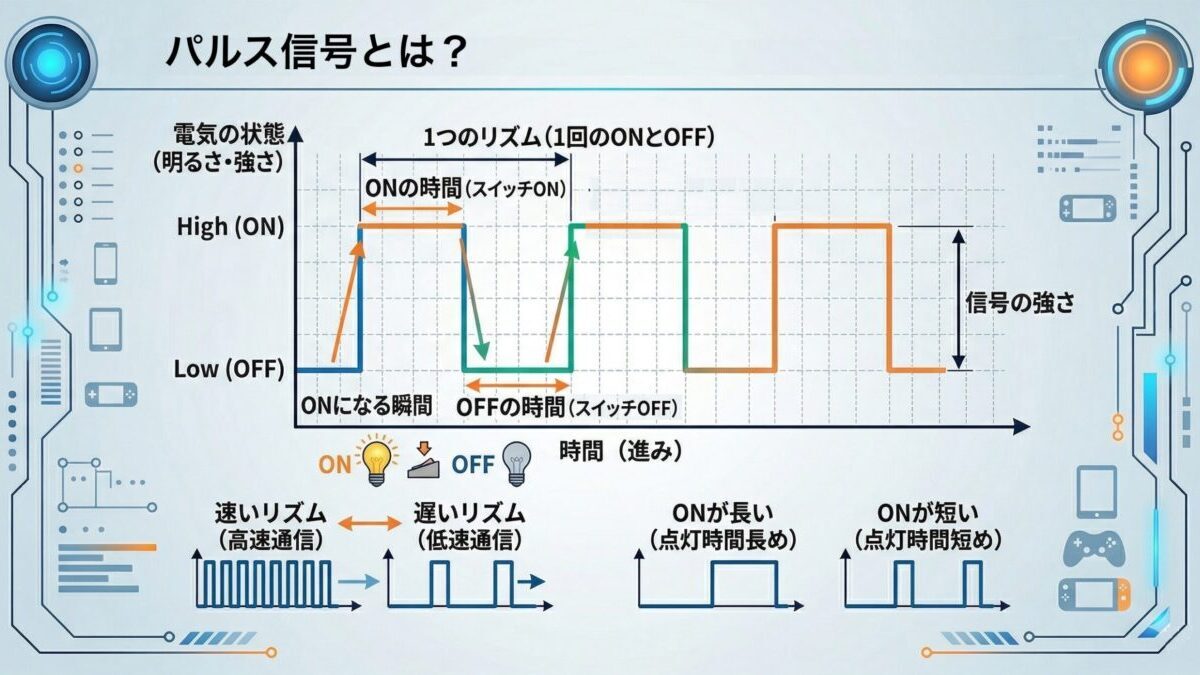
図のように、信号の電圧の高さが「Low」の状態(限りなく0Vに近い状態)でOFF、「High」の状態(5V、12V、24Vなど)でONとして扱います。
エンコーダの軸を回すと、回転量に合わせてこのON/OFF信号が出力されるので、出力されたON信号の数を数えることで軸がどれぐらい回ったかが分かるわけです。
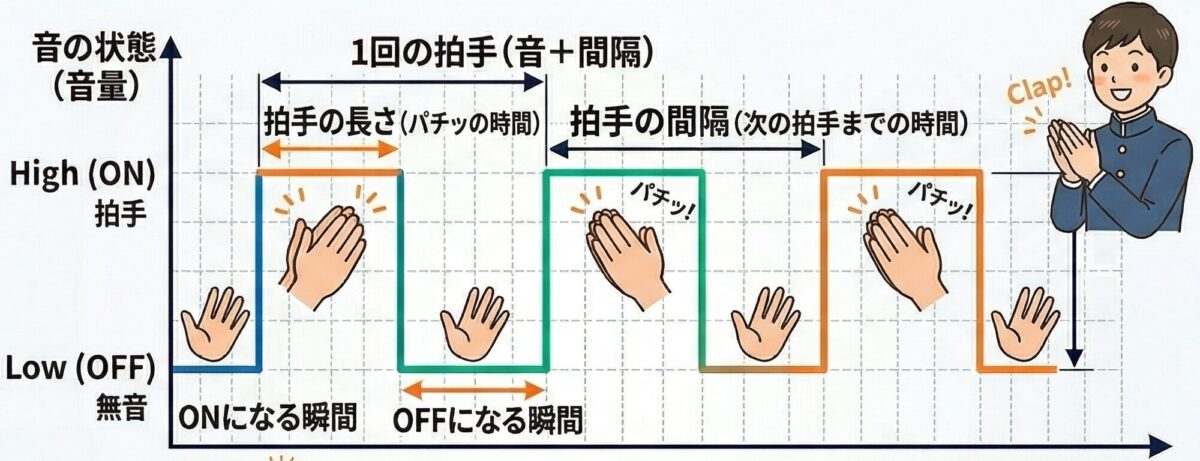
例えるなら、手を叩いて「パチッ!パチッ!パチッ!」とリズムをとるようなものですね。
 なべ
なべエンコーダから出力されてくる”拍手”の回数を数えていると考えれば、分かりやすいと思います
また、軸を速く回すと出てくるパルス信号のスピードもそれに比例して速くなりますので、パルス信号が出力されてくる間隔の速さでエンコーダがどれだけの速さで回転しているかを計算することも可能です。
このように、回転に応じて単純にパルス信号が出力されるエンコーダがインクリメンタル形です。
アブソリュート形
アブソリュート形は軸の回転量を絶対値で出力するタイプのエンコーダです。
基準値(ゼロ)からの正確な現在地のこと
インクリメンタル形は単純にパルス信号を出すだけなのに対し、アブソリュート形は軸が回転した量(角度)をエンコーダから教えてくれるという違いがあります。
つまり、インクリメンタル形のように制御装置がパルス信号をカウントしなくても、エンコーダから送られてくる回転位置のデータを受け取るだけで、常に正しい位置を把握できるんです。
ひでくん電源が切れた状態でエンコーダが回転したとしても、正しい回転位置を教えてくれるんだ
アブソリュート形のデータの出力方式には、大きく分けて「パラレル通信方式」もしくは「シリアル通信方式」の2種類があり、システム構成に合わせて最適な通信方式を選んで使うことが可能です。
ここでは例として、アブソリュート形でよく使われるパラレル通信方式のエンコーダがどのように現在地を教えてくれるのかを見ていきましょう。
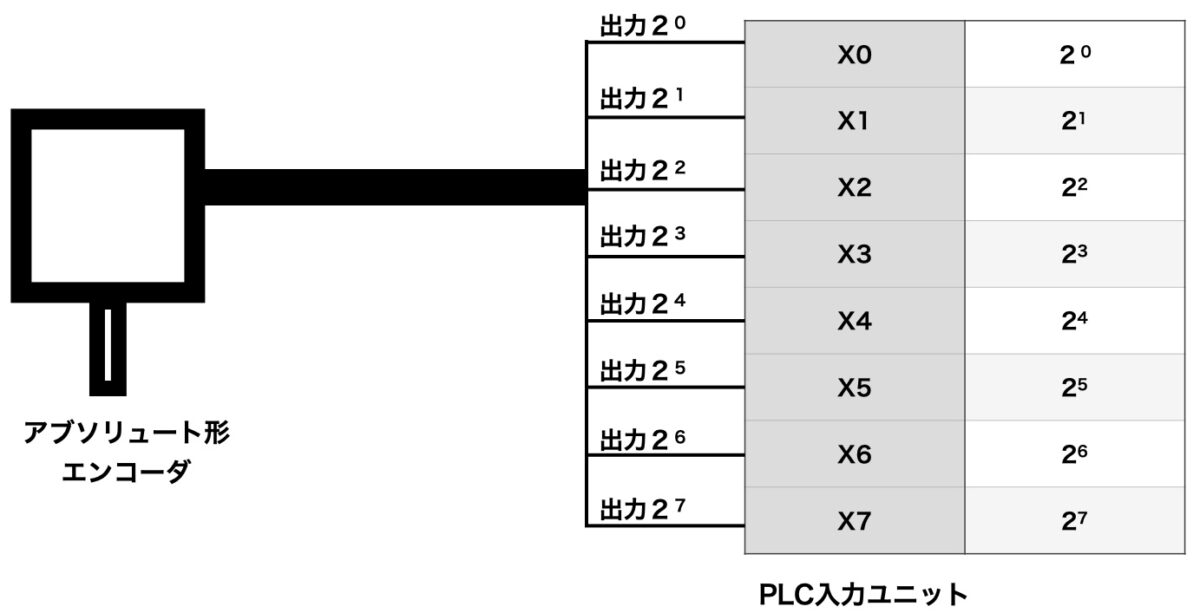
上図はパラレル通信方式のアブソリュート形エンコーダの接続方法を表したものです。
エンコーダからは「出力20」〜「出力27」までの信号線が出ていて、PLCの入力ユニットに一本ずつ接続されています。※信号線の数はエンコーダの機種によって異なります。
例えば、エンコーダが「1」という現在地データを出力する場合は、「出力20」の信号のみを出力し、他の信号は出力をOFFにします。
このとき、20を計算すると「20=1」になるので、PLCは「現在地は”1″なんだな」ということが分かります。
次に、エンコーダが「100」という現在地データを出力するとしましょう。
この場合、エンコーダからは「出力22」と「出力25」と「出力26」の信号が出力され、他の信号は出力がOFFになります。
これを計算すると、「22=4」、「25=32」、「26=64」となるので、数値を全て足し合わせると「4+32+64=100」となり、PLCは「現在地は”100”なんだな」と正確に把握することができるのです。
このように、複数の信号線のON/OFFの組み合わせによって、常に正確な回転位置を出力し続けるのがパラレル通信方式のアブソリュート形エンコーダです。
なべアブソリュート形エンコーダから出力される回転位置についても、”パルス”と表現する場合がありますね
どうやって信号を出力しているの?|エンコーダの仕組みについて
ロータリエンコーダは次のような仕組みで信号を出力しています。
インクリメンタル形の仕組み
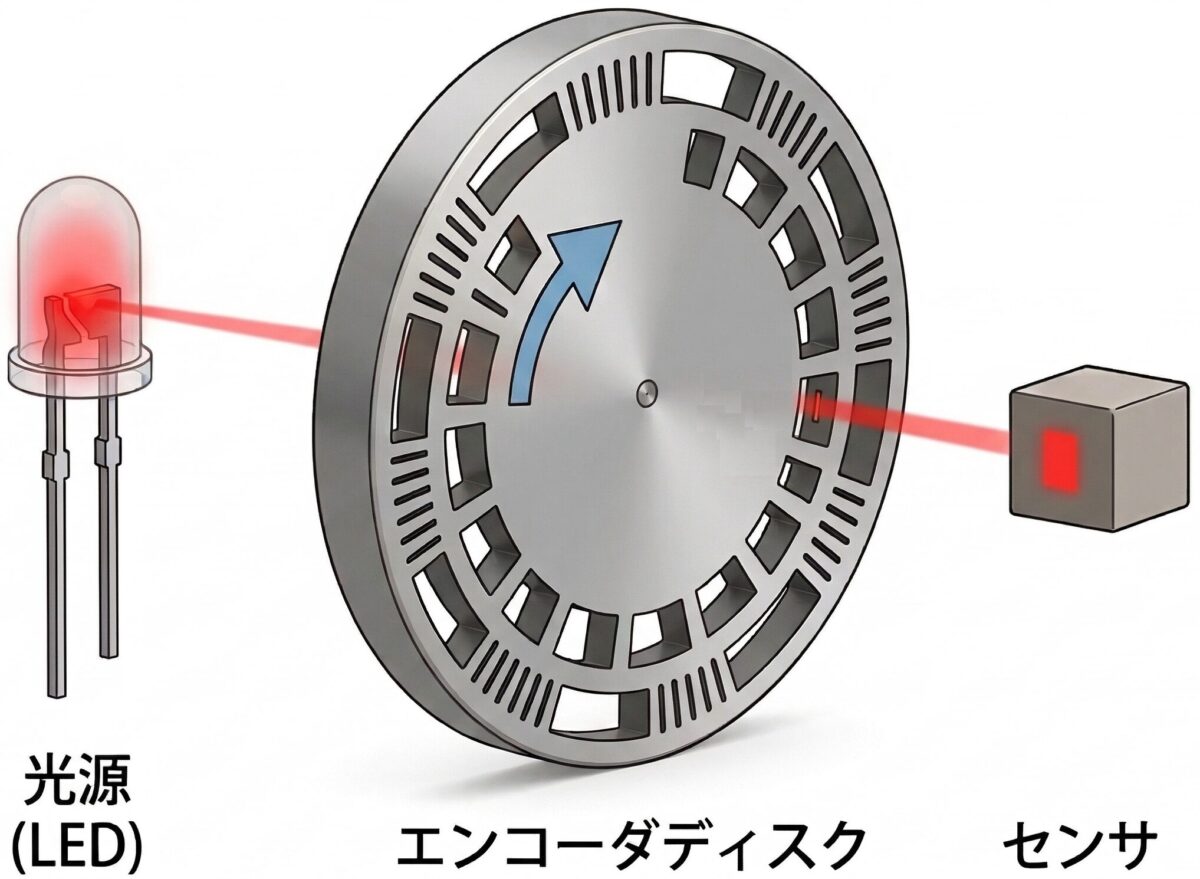
上の図は、インクリメンタル形エンコーダの基本的な仕組みを簡単に表したものです。
エンコーダの軸にはスリットと呼ばれる細い穴があいた円盤(エンコーダディスク)が取り付けられており、軸を回すとそれに連動して円盤も回転します。
また、円盤を挟み込むように、光源(LED)とセンサが配置されていて、LEDから出た光がスリットを通りセンサに届くような構造になっています。
この状態で円盤を回すと、次のようにセンサが動作します。
- LEDの光がスリットを通過する→センサが光を検出して信号ON
- LEDの光がスリットの無い部分に遮られる→センサに光を検出できず信号OFF
よって、円盤を回転させると定期的に信号がON/OFFを繰り返し、それがパルス信号となってエンコーダから出力されるわけですね。
ちなみに、インクリメンタル形のエンコーダの回転方向は、次の図のような仕組みで検出しています。
引用先:旭化成株式会社(インクリメンタル方式とアブソリュート方式)
引用先:旭化成株式会社(インクリメンタル方式とアブソリュート方式)
インクリメンタル形のエンコーダにはA相とB相の2種類のパルス信号があり、LEDと光電センサをそれぞれ1/4ピッチずらして配置されています。
この配置でエンコーダを回すと、A相とB相それぞれのパルス信号がズレて出力されるので、出力される順番をみることで回転方向が分かるようになっています。
ひでくん意外と単純な仕組みだけど、よく考えられているよね
アブソリュート形の仕組み
引用先:多摩川精機株式会社(ロータリーエンコーダ 概要・技術解説)
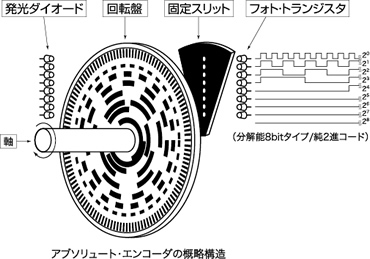
アブソリュート形エンコーダも基本的にはスリット入りの円盤やLED・センサを使用しますが、インクリメンタル形よりも複雑な構造をしています。
円盤のスリットは現在地を絶対値出力できるように、複雑かつ細かくパターンが刻まれており、LEDと光電センサの数も出力する信号線ぶん配置されています。
なべ20〜27の出力信号がある場合は、LEDとセンサが8組あります
この円盤を回していくと、複雑なスリットパターンがLEDから出た光を通過させたり遮ったりして、都度その時の回転位置を出力します。
この出力されたLEDの組み合わせを制御装置側が計算することで、エンコーダの現在地が絶対値で分かるというわけですね。
アブソリュート形エンコーダの中には、単純なスリット形のもののほかに、機械的・電気的な仕掛けによって1回転以上円盤が回っても絶対値出力が可能な多回転タイプが存在します。
ひでくんアブソリュート形はメーカーによって様々な仕組みが存在するよ!
その他のエンコーダ(アブソコーダ)
引用先:エヌエスディ株式会社(1回転型アブソコーダ検出器VRE)

その他のエンコーダとして「アブソコーダ」をご紹介しておきます。
アブソコーダはエヌエスディ株式会社が製造しているロータリエンコーダの商品名で、アブソリュート形に分類されます。
アブソコーダは光学的な仕組みではなく電磁的な仕組みで軸の回転量を検出しています。
引用先:エヌエスディ株式会社(回転型アブソコーダの基本原理)アブソコーダの構造図

引用先:エヌエスディ株式会社(回転型アブソコーダの基本原理)アブソコーダの原理図
アブソコーダは4つのコイルと偏心した鉄のローター軸で構成されています。
アブソコーダの軸を回すと、偏心した軸とコイルの隙間が変化することで、内部に発生する磁界も変化します。
この磁界の変化を専用の変換器が読み取って角度θを算出し、様々な出力方式に変換され、PLCなどの制御装置が扱いやすい様々な信号に変換して、正確な回転位置情報を出力することが可能となります。
引用先:エヌエスディ株式会社(バイナリ・グレイコード出力変換器 NCV-20N)

上の写真が「バイナリ・グレイコード出力変換器」と呼ばれるアブソコーダ専用の変換器ですね。
この変換器に専用ケーブルでアブソコーダと接続すれば、光学式のアブソリュート形エンコーダと同じような感覚で回転量を取得できます。
他にも、アブソコーダは多回転タイプ「MREシリーズ」もラインナップされていますので、長い距離を走行する装置であっても正確な現在地検出が可能です。
さらに、アブソコーダは外装がかなり頑丈につくられていますので、外部からの衝撃などで破損させない限りは壊れることが少なく、悪環境でも問題なく使用ができるというメリットもあります。
なべ環境が過酷な製鉄所の設備やクレーン等でも数多く使われていますよ!
それぞれの方式のメリット・デメリット
インクリメンタル形とアブソリュート形には、それぞれメリットとデメリットが存在します。
特徴を理解して適切な方式のエンコーダを選択することが非常に重要です。
インクリメンタル形のメリット
本体が安価
インクリメンタル形エンコーダは、アブソリュート形のような複雑な構造ではなく、シンプルな構造で部品点数も少ないことから、比較的安価に入手することが可能です。
機種によっては外装が頑丈で高価なものも存在しますが、一般的によく使われるタイプであれば、約1〜3万円程度の価格帯で手に入れることができ、コストパフォーマンスにも優れています。
配線がシンプル
パラレル出力のアブソリュート形のように沢山の信号線を必要としないため、配線が非常にシンプルというメリットがあります。
一般的なインクリメンタル形エンコーダであれば、配線は電源線2本とA相B相1本ずつ、必要に応じてZ相1本を追加したとしても計4〜5本程度で済みます。
情報の扱いが簡単
インクリメンタル形はON/OFFだけの単純なパルス信号が出力されるだけです。
そのため、入ってくるパルス信号を積算するという単純な制御で、移動量を計算することができます。
ひでくん安価で制御がシンプルなのがインクリメンタル形の強みだね!
インクリメンタル形のデメリット
電源が切れると位置が分からなくなる
インクリメンタル形エンコーダの最大のデメリットは、電源が切れてしまうと正しい現在地が分からなくなってしまうという点です。
これは、インクリメンタル形が制御装置側で常にパルス値をカウントして制御しているためで、停電が発生したり装置の電源をOFFにしたりすると、エンコーダからパルス信号が途絶えるなどして、制御装置がパルス値を正常にカウントできなくなります。
そのため、再度装置を動作させる場合は、パルス値を数え始めるスタートの位置(原点)まで装置を動かさなくてはならない手間が発生します。
ノイズの影響を受ける場合がある
インクリメンタル形は配線ルート上にノイズの発生源があると、ノイズによってエンコーダ側から出力されたパルス信号と制御装置側に入ってくるパルス信号にズレが生じる場合があります。
なべ僕自身、毎回装置の止まる位置が変わったり、目的の位置まで装置が動作しないといった不具合を経験したことがあります
エンコーダと制御装置間の配線についてはしっかりとしたノイズ対策が不可欠です。
高速カウンタユニットが必要不可欠
インクリメンタル形エンコーダのパルス信号は、PLCなどの入力ユニットにそのまま接続してもうまくカウント出来ません。
エンコーダからは一瞬で何百何千というパルス信号が入ってくるので、普通の入力ユニットでは信号を拾いきれないためですね。
したがって、高速に送られてくるパルス信号を取りこぼすことなく検出するためには、「高速カウンタユニット」という特殊ユニットを準備してそれに接続する必要があります。
ひでくんインクリメンタル形はパルス信号を確実にカウントできる環境を整えてやることがとても重要だよ!
アブソリュート形のメリット
電源が切れても回転位置が分かる
アブソリュート形エンコーダで最も大きなメリットが、電源が切れた状態で動いても回転位置が分かるという点です。
アブソリュート形の場合は、現在の回転位置がどこなのかを内部の仕組みで分かるようにしているので、電源が切れた状態で軸が動いたとしても位置が分からなくなるということが有りません。
停電等で電源が切れてしまった場合でも、エンコーダ側からは常に正確な位置を制御装置側に出力しているので、装置をいちいち元の位置に戻さなくても、停止した位置から運転を再開するといったことが可能になります。
なべこれが1番のメリットですね!
ノイズの影響を受けにくい
アブソリュート形は、パルス信号を数える方式ではなく回転位置をエンコーダ側から教えてくれる方式なので、ノイズに邪魔されて位置が狂うといった不具合が発生しにくいというメリットがあります。
一般的な入力ユニットに接続できる
エンコーダ側から入力される回転位置の情報は、PLCの一般的な入力ユニットにそのまま接続して得ることが可能です。
そのため、インクリメンタル形のように別途「高速カウンタユニット」を追加しなくても、回転位置の情報を得ることができます。
ただし、アナログ信号で回転位置を出力するタイプの変換器を使用する場合は、それに応じた特殊ユニットが別途必要になります。
ひでくん設備を”使用する人”にとってはメリットの多いエンコーダだよ!
アブソリュート形のデメリット
比較的高価
アブソリュート形エンコーダは構造が複雑であることや、それに掛かる部品点数が多いことなどから比較的高価になりやすいというデメリットがあります。
特にエヌエスディのアブソコーダについては、本体だけでなく専用ケーブルや変換器など本体以外の機器を揃える必要があるため、トータルのコストではインクリメンタル形よりも不利になります。
高回転の用途には向かない
アブソリュート形は構造上何回転もさせるような用途にはあまり向きません。
多回転タイプもありますが、数十〜数百回転させて位置決め制御をするといった用途には、インクリメンタル形の方に軍配が上がります。
短い距離を行ったり来たりする装置など、ある程度限られた動作範囲の中で位置決め制御をするような場合には、アブソリュート形エンコーダはとても有効的です。
配線数が多い
回転位置をパラレル信号で出力するタイプなどは、信号線がインクリメンタル形と比べて多くなりやすいというデメリットがあります。
位置調整が面倒
アブソリュート形は軸の回転位置が絶対値で出力されるという性質上、装置との位置関係が狂うと調整が面倒というデメリットが存在します。
例えば、何らかのトラブルや補修作業でギアからエンコーダを切り離さなくてはならなくなった場合、通常は元通りの位置関係で復旧できるよう、マーキングを付けてから取り外します。
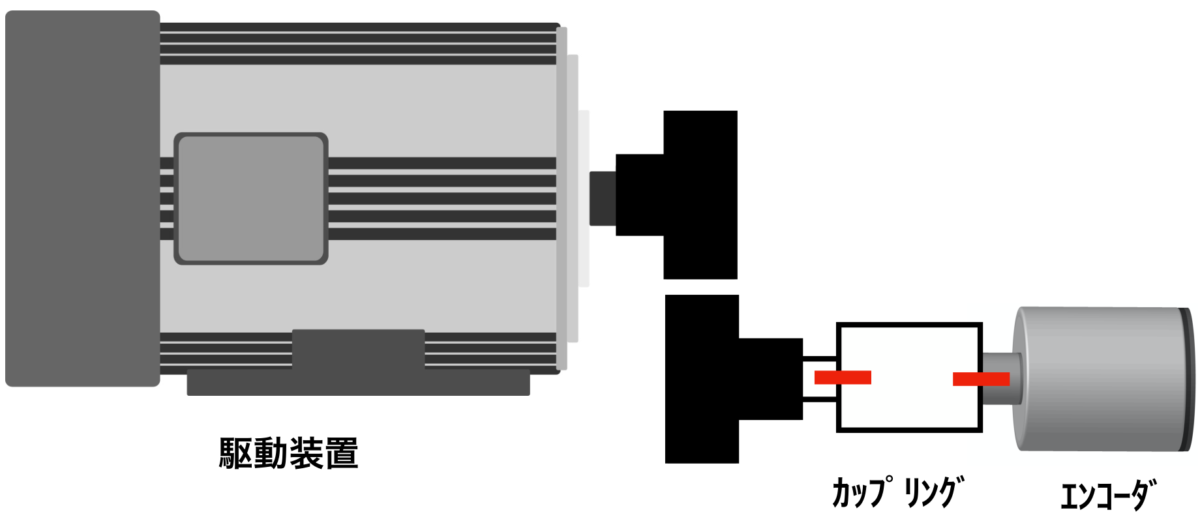
切り離す前のマーキングからわずかでもズレると、今までの位置関係が全てズレてしまうため、マーキングに合わせてキッチリと復旧する必要があります。
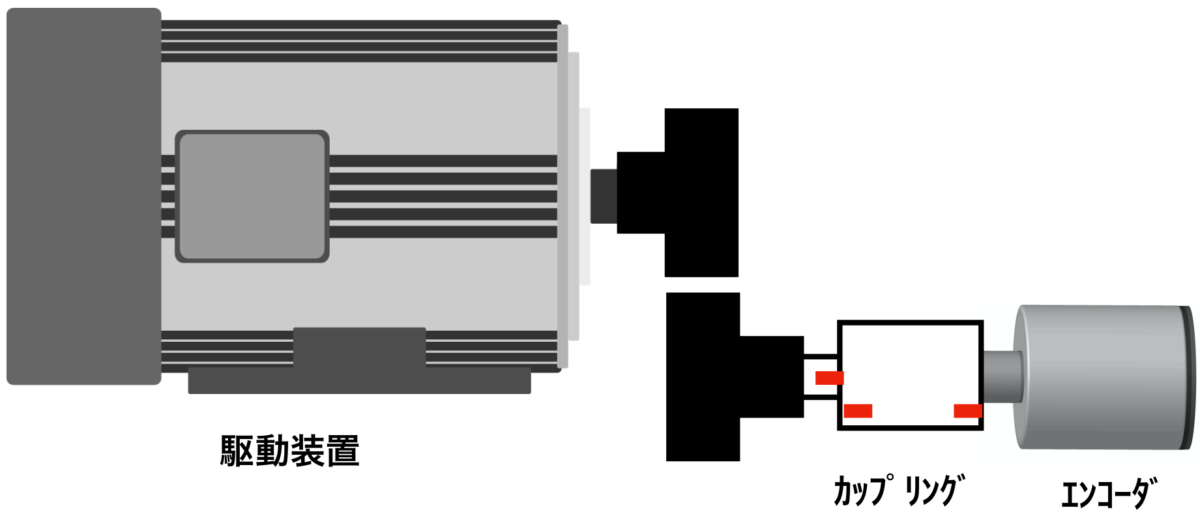
上の図bを見てみると、カップリングのマーキングとギアのマーキングが合っていませんね。
このようにマーキングがズレた状態で復旧してしまうと、設備を稼働させたときに停止位置が変わってしまい、トラブルの原因になってしまいます。
インクリメンタル形の場合は、エンコーダと駆動部の位置関係がズレたとしてもあまり影響は有りませんが、アブソリュート形の場合は位置関係がズレないよう細心の注意が必要です。
実際、このような作業を現場で何回も行った経験が僕自身あって、調整にとても時間を要したことがあります。
これについては、ソフトの組み方と仕組みでカバーすることは出来ますが、そのような機能がない設備については都度調整作業が発生します。
なべ“保全をする人”にとっては、アブソリュート形は少々取り扱いが大変なんですよね
エンコーダの主なスペックについて

最後に、ロータリエンコーダの主なスペックについて解説します。
現場での選定の参考にしていただけたら幸いです。
分解能
ロータリエンコーダを選定する上で欠かせないのが「分解能」です。
分解能とはインクリメンタル形の場合は「P/R」の単位で表され、1回転あたり何パルス出力できるのかを示します。
例えば分解能が1,000P/Rのロータリエンコーダだとすると、軸を1回転回したらちょうど1,000パルス出力される機種ということになります。
また、アブソリュート形の場合は、1回転当たりに何分割して回転位置を出力するかを示します。
分解能が高いエンコーダは高精度と言えますが、その分価格が高くなります。
特に、インクリメンタル形の場合はノイズによるパルス飛び(制御装置がパルス信号を受け取り損ねる)が発生するリスクが増えますので、不必要に高い分解能のものを選定しないようにすることが大切です。
ひでくん何事も”ほどほど”が肝心だね
許容最高回転数
ロータリエンコーダは機種によって許容できる最高回転数が決められています。
単位は「rpm」で表され、1分間に何回転するのかを示したものになります。
一般的には5,000〜6,000rpm程ですが、高速回転対応のものであれば10,000〜12,000rpm、機種によっては1,000rpmぐらいしかないものも存在します。
そのため、一緒に回転させる相手(駆動軸)とエンコーダの組み合わせをよく検討してから選定するようにしましょう。
なべアブソリュート形は許容最高回転数の数値が低い傾向にありますので、選定するときはスペック表をよく確認しましょう
まとめ
以上、ロータリエンコーダの種類や仕組み、その特徴などについて解説しました。
ロータリエンコーダは方式や機種によって様々な特徴があります、それらの特徴をうまく利用してシーンに応じた使い分けをしてください。
- ロータリーエンコーダには「インクリメンタル形」と「アブソリュート形」に大別される
- インクリメンタル形は出力されるパルス信号で制御する
- アブソリュート形は回転位置を絶対値で出力してくれる
- インクリメンタル形とアブソリュート形はそれぞれメリット・デメリットがあるため、シーンに応じた使い分けが不可欠
